




Germany: As today’s conditions require a higher level of digitalisation, Deutsche Bahn (DB) has launched an initiative to contribute to the development of digital railway technologies, Digitalen Schiene Deutschland (DSD). As part of this initiative, the national operator has implemented and is implementing various projects. For example, tests of an obstacle detection system on four GoA2 trains were completed in Hamburg in June 2023. DB then launched another project, AutomatedTrain, which involves a three-year trial of unmanned train automation technology on the non-isolated railway infrastructure of the Stuttgart S-Bahn.
In an article in the German rail industry magazine Deine Bahn, members of DB’s infrastructure division InfraGo and a representative of the software development company dSPACE talked about one of the key aspects of the deployment of unmanned rail transport, i.e. digital simulation-based modelling. The ROLLINGSTOCK editorial team has adapted this feature.
According to the authors, limited resources and high safety standards make it technically challenging, time-consuming and costly to test GoA4 rolling stock under real conditions. Within this framework, current activities in the field of unmanned train operation focus on performing as many of these processes as possible in a simulated environment.
DB, in collaboration with dSPACE, explored the implementation of a simulation environment for testing GoA4 unmanned systems. They started with a proof of concept, focusing on testing the incident prevention subsystem, IPM.
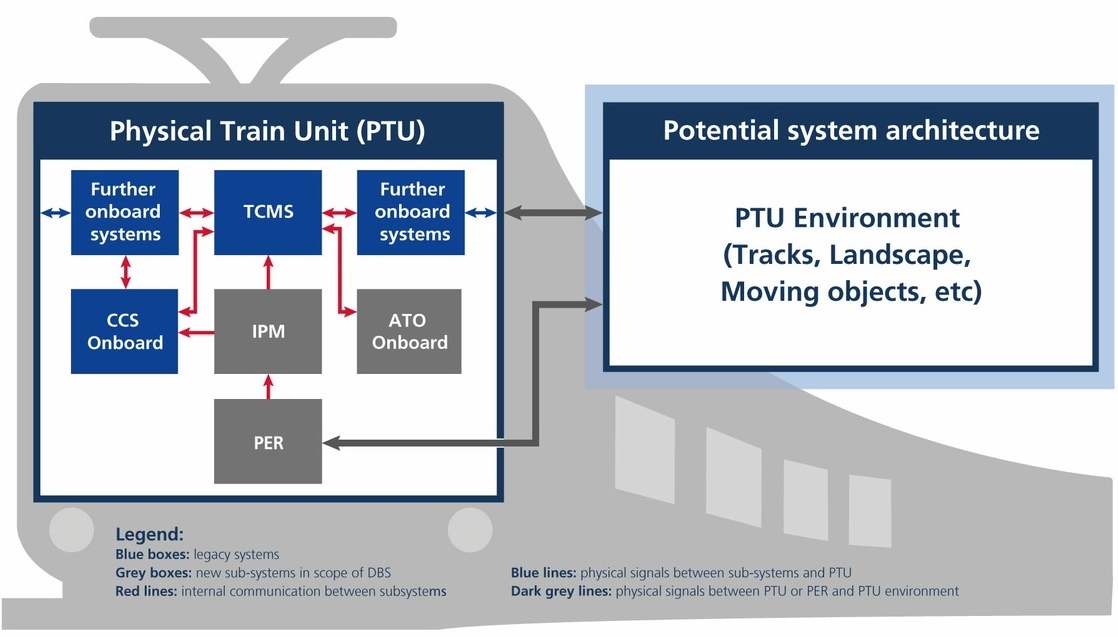 The closed interaction loop between train subsystems in the dSPACE simulation environment (enlarge). Source: dSPACE
The closed interaction loop between train subsystems in the dSPACE simulation environment (enlarge). Source: dSPACE
For the proof of concept, a closed control loop was created using DB’s simplified IPM model integrated into the dSPACE simulation environment. It was then possible to use dSPACE tools to commission the loop with all the simulated subsystems (brakes, drive, CCS onboard), train dynamics and environment (PTU).
How the simulation environment was created
First, DB and dSPACE used the latter’s solution, Automotive Simulation Models, to create a train model that represents the train dynamics and takes into account the structure of different train formations.
The train dynamics model was then parameterised with another dSPACE solution, ModelDesk. For the proof of concept, the parameters of the four-car Class 423 electric train, which was produced for urban rail networks in Germany between 1997 and 2008, were used.
To create a railway-like environment, in the basic railway visualisation were replaced railway-specific objects such as rails, catenary supports and light signals, and a railway network from OpenStreetMap was imported into ModelDesk.
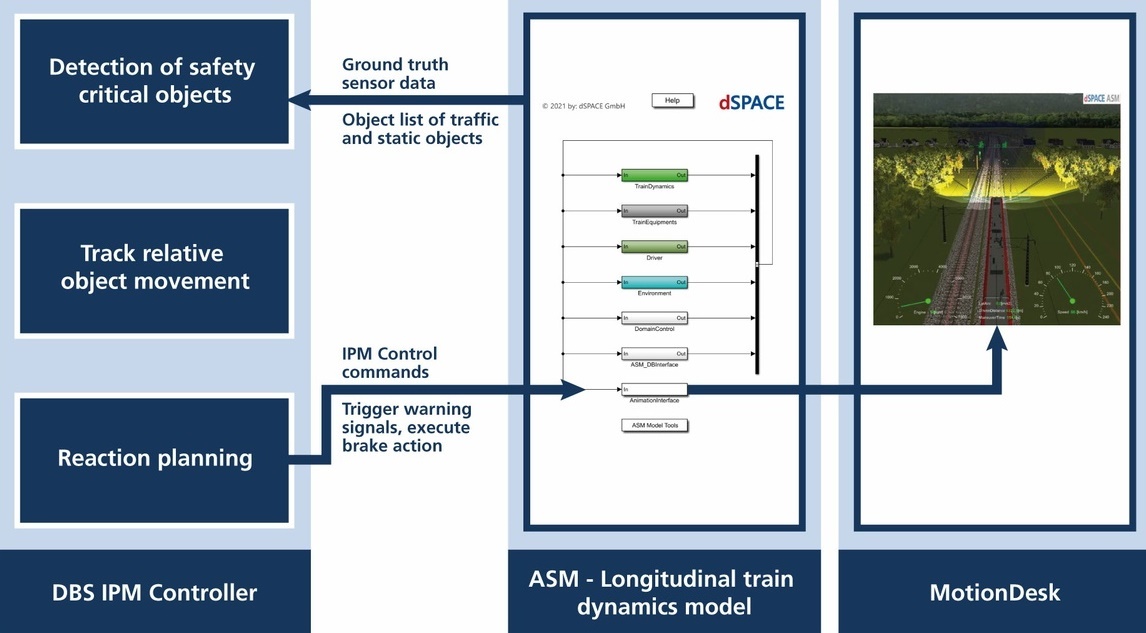
The closed control loop with dSPACE ASM (enlarge). Source: dSPACE
The next step was to integrate DB’s simplified IPM controller to create a closed control loop with the ASM model. A simulated perception system sent data to the IPM controller, while object lists provided by the ASM ground sensors were used. Depending on the object detected, the IPM controller determines whether the train must react to these objects. The desired reaction is then sent back to the ASM train dynamics model that performed the reaction. This reaction can be the activation of warning signals or regular or emergency braking.
How the simulation was evaluated
The suitability of the simulation environment created and the associated dSPACE tool chain for Digitale Schiene Deutschland was tested in two application scenarios.
In the first scenario, a deer crosses the tracks. 3D sensors identify it as a moving animal-type object and send the data to the IPM controller. The controller responds to the presence of the object in the track area by activating audible and visual warnings and emergency braking. When the deer leaves the track area and is no longer detected by the system, the train resumes normal operation.
The second scenario involves a train approaching a crossing with a parked car.
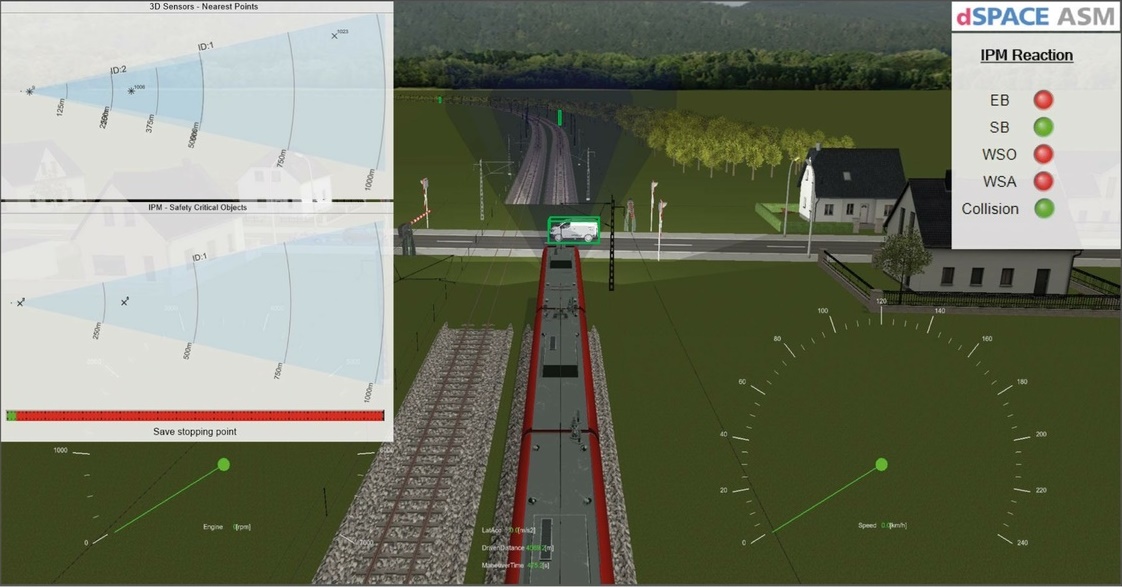 MotionDesk visualisation of a collision between a train and a car at a railway crossing. Source: dSPACE
MotionDesk visualisation of a collision between a train and a car at a railway crossing. Source: dSPACE
Of all the objects in the image above, only two, marked with green rectangles, are in the train’s path. The IPM controller classifies them as safety critical and the system reacts with a visual warning with headlights and an audible warning, and activates a service brake. If the distance to the object is too short and the service brake cannot stop the train, the IPM controller activates the emergency brake. As the remaining safe distance to stop becomes shorter, the IPM activates the emergency brake and triggers a visual and audible warning. The train can then stop in time.
With these two simulated application scenarios, it was possible to improve the coverage by changing the sensor position and to revise the train model as it had not taken into account the observation history. Another change is the use of new software, AURELION, instead of MotionDesk. The new tool visualises the environment and simulates sensors, cameras, lidars, and radars more realistically.









